Gebäudedigitalisierung mittels NavVis Laserscanning für ein 3D-Modell in Revit
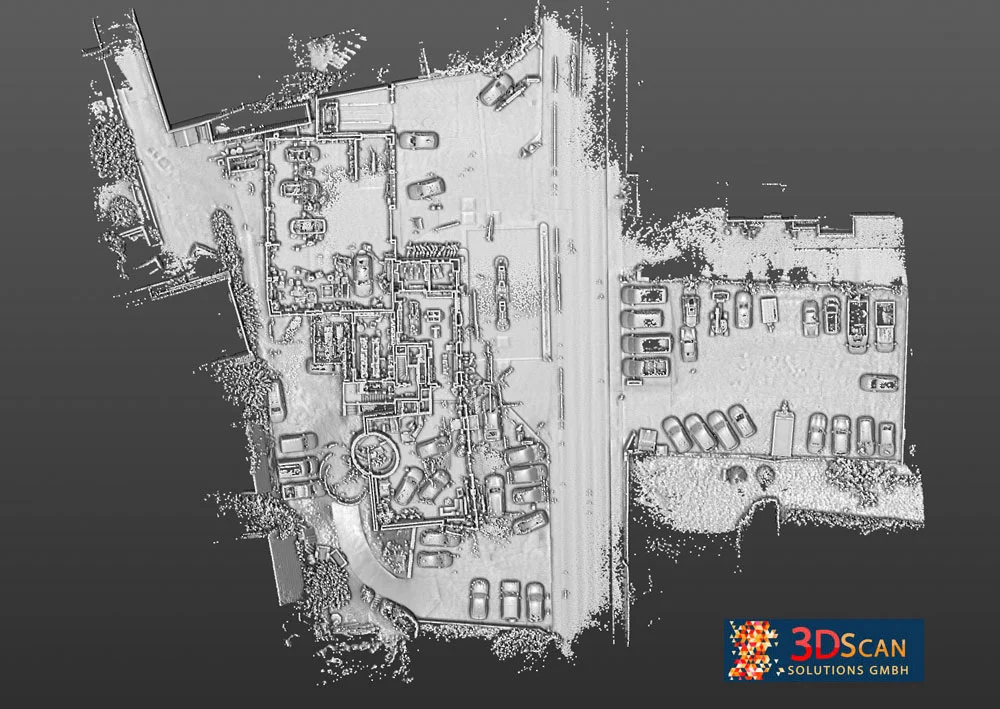
Für anstehende Umbaumaßnahmen für ein Autohaus am Ammersee sind neue Bestandpläne notwendig gewesen. Die 3DScan konnte die Aufgabe ausschließlich mit NavVis Laserscanning lösen und das Gebäude innerhalb eines Tages vermessen. Das Gelände wurde mittels GPS-Station eingemessen und die Passpunkte direkt in NavVis eingelesen.
Der Vorteil des NavVis Laserscanners ist zudem der 360Grad/Punktwolkenviewer. Hier kann der Kunde bereits zwei Tage nach NavVis Laserscanning sein Objekt mittels Browser betrachten und erste Messdaten aus der Punktwolke übernehmen.
Nach erfolgter Registrierung wird das 3D-Modell wieder in Autocad Revit erstellt. Als Level of Detail wird hier LOD300 zu Grunde gelegt.
Projektinformationen
Zeitraum: März 2023
Kunde: Autohaus am Ammersee
Projekt: Gebäudeaufmaß des kompletten Firmengebäudes inkl. Wohnhaus und erweiteter Verkaufsplatz für Fahrzeuge
Die Inhaber des Autohauses benötigten neue Bestandpläne um für die anstehenden Umbaumaßnahmen neue Bestandspläne und Schnitte durch das Industriegebäude eine exakte Planung vornehmen zu können.
Die Digitalisierung erfolgte mit dem mobilen Laserscanner, den NavVis VLX 2.0 und einer Trimble GPS-Station. Die Registrierung der Punktwolke wurde teilweise in der Cloudplattform IVION vorbereitet und in Realworks exakt ausgerichtet.
Die Modellierung erfolgt nun in Autocad Revit in LOD 300 ohne TGA.
Der Arbeitsprozess
Für die Erstellung der 3D-Modells sind diverse Arbeitsschritte notwendig. Unser Arbeitsprozess ist wie folgt:
- Platzierung von ca. 16 GPS-Messpunkten um das Gebäude verteilt
- Einmessen der Messpunkte mit dem GNSS Empfänger Trimble R10LT
- Registrierung der Punktwolke in NavVis IVION und Trimble RealWorks
- Modellierung eines 3D-Modelles in REVIT
Merkmale
Das gewünschte Ergebnis basiert auf nachfolgenden Kennzahlen:
- ca. 16 GPS-Messpunkte
- ca. 8 Laserscanabschnitte mit dem navVis VLX
- Erfassung vor Ort: 1 Tag
- Registrierung der Punktwolke: ca. 1 Tag
- Modellierung als Revit 3D-Modell: ca. 2 Wochen



